Acceleration-Optimized Autonomous Vehicle
June 2019Acceleration-Optimized Autonomous Vehicle
My mechanical engineering thesis, creating a new concept for an autonomous vehicle with shape-shifting capabilities. The main aim of the project was achieving close-to-gravity accelerations (assuming good surface and environment conditions) without tipping and ensuring a minimum level of stability.

A possible use case for this new device: a mobile platform and robot manipulator.
Tools:
- Solidworks: Mechanical Design.
- Rhinoceros: Casing surface-based design.
- Octave: Iterative calculations for design parameters.
- Blender: Animations and 3D rendering.
- Xcode: Using Apple's SpriteKit Engine to simulate physics scenarios.
The Process
Designing this system not only posed an interesting mechanical challenge, but also meant looking for an overall aesthetic that felt fitting for both industrial and service robotics settings, while enabling the vehicle to modify its geometry.

A small peek into the inside mechanism.
The main design inspirations include Tesla's Roadster 2020 and Model 3.
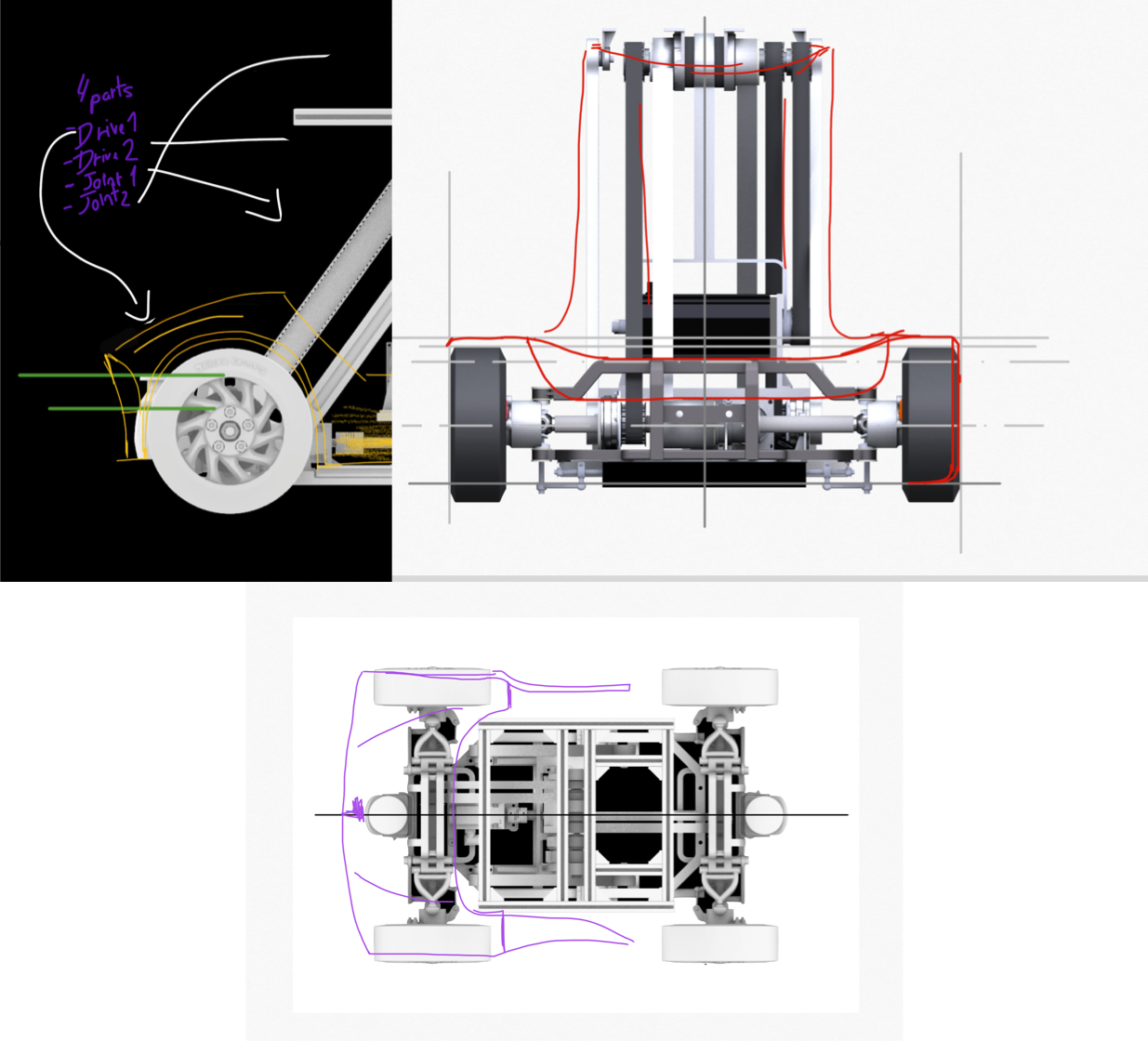
Some early design sketches for the case.